

Positionnement de raven
Une question récurrente consiste à déterminer la position du robot dans un environnement déterminé.
La première solution envisagée utilise une sorte de radar qui recherche les éléments placés autour du robot :
- Un télémètre est placé sur une tourelle. Le robot balaye l'espace autour de lui et enregistre les couples de données angle de la tourelle/distance. Cete ensemble de données permet de définir un plan sommaire de l'environnement de Raven. En se déplaçant un peu et en répétant l'opération, le robot est ainsi capable de cartographier l'ensemble de son espace de travail. Une fois cet environnement cartographié, il peut retrouver sa position (en recherchant de nouveau son environnement et en le comparant avec sa cartographie).
Néanmoins ce type de positionnement est assez imprécis (le télémètre ultra-son possède un cone de détection assez diffus, et la détection d'une surface plane oblique par rapport au capteur est aléatoire). Ce système peut etre utile pour cartographier son espace, mais ne permetrait pas un positionnement précis. Voici un autre système, plus complexe, mais qui devrait permettre d'obtenir un positionnement précis de Raven.
Ce système est séparé en plusieurs parties :
- Sur Raven, un émetteur laser est monté sur une tourelle qui peut effectuer une rotation à l'horizontale (comme dans la première solution). Cet émetteur laser trace une ligne verticale.
- A différents endroits de l'espace de travail de Raven, sont disposées des balises. Chaque balise possède un numéro différent et lorsque le rayon laser éclaire la balise, cette dernière envoie un signal radio avec son numéro. Le rayon laser émis par Raven forme une ligne verticale pour etre certain de toucher la balise, meme s'il y a une légère différence de hauteur/d'inclinaison entre Raven et ses balises.
- Quand Raven cherche à connaitre sa position, il scanne autour de lui en envoyant sa ligne laser autour de lui. Quand une balise répond, on connait l'emplacement de la balise (puisqu'elles sont identifiées et que leur emplacement est connu) et Raven connait l'angle qu'il forme avec le rayon. On peut donc déterminer une droite sur laquelle on est placé. L'intersection de plusieurs droites détermine la position de Raven
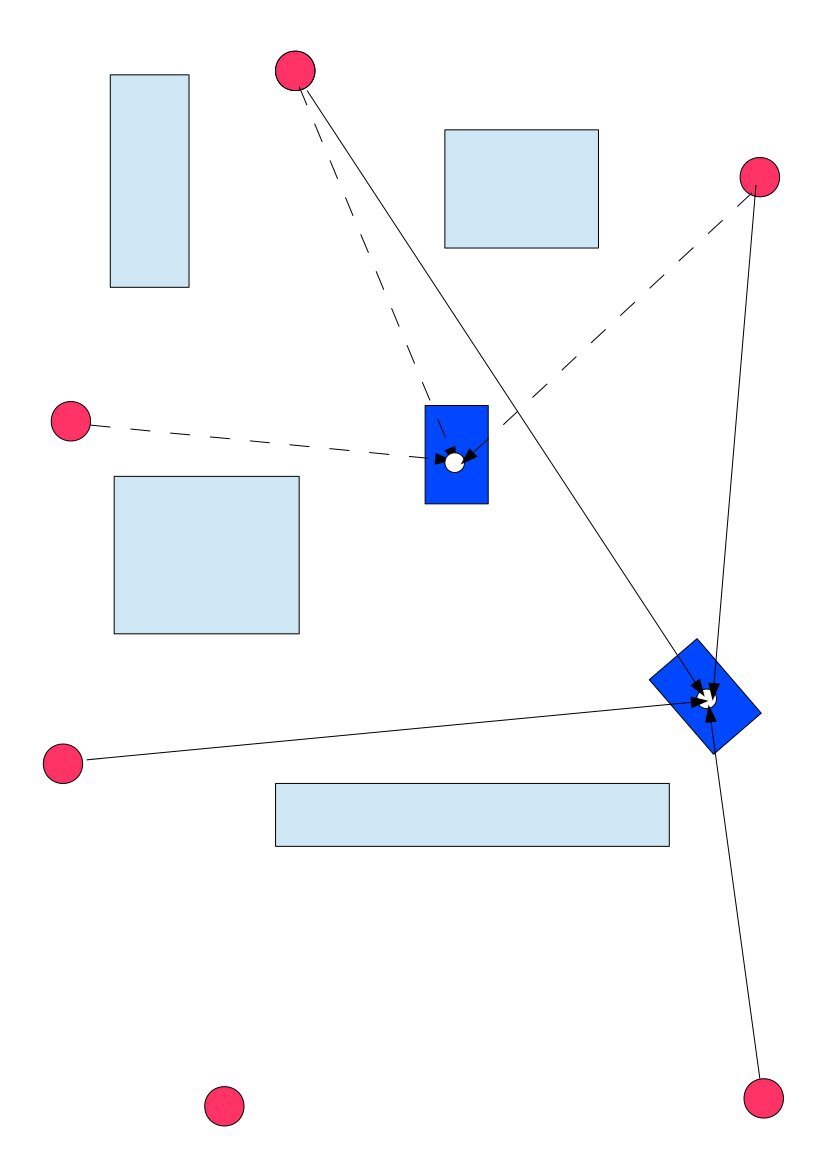 Le croqui ci-contre présente deux cas de positionnement. Les trois balises qui répondent (et dont on connait l'emplacement) ermettent de déterminer la position et la direction de Raven.
Le croqui ci-contre présente deux cas de positionnement. Les trois balises qui répondent (et dont on connait l'emplacement) ermettent de déterminer la position et la direction de Raven.



/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
/https%3A%2F%2Fstorage.canalblog.com%2F38%2F10%2F1267693%2F101345783_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F51%2F80%2F1267693%2F96872872_o.jpg)