

Raven. Fin de la phase matérielle
Bonne nouvelle pour RAVEN.
La construction matérielle est quasiment terminée (j'ai encore en projet d'ajouter un écran LCD pour afficher différentes informations, mais ce n'est pas crucial). Cette phase matérielle étant terminée, on va pouvoir passer à la partie logicielle (programmation du robot).


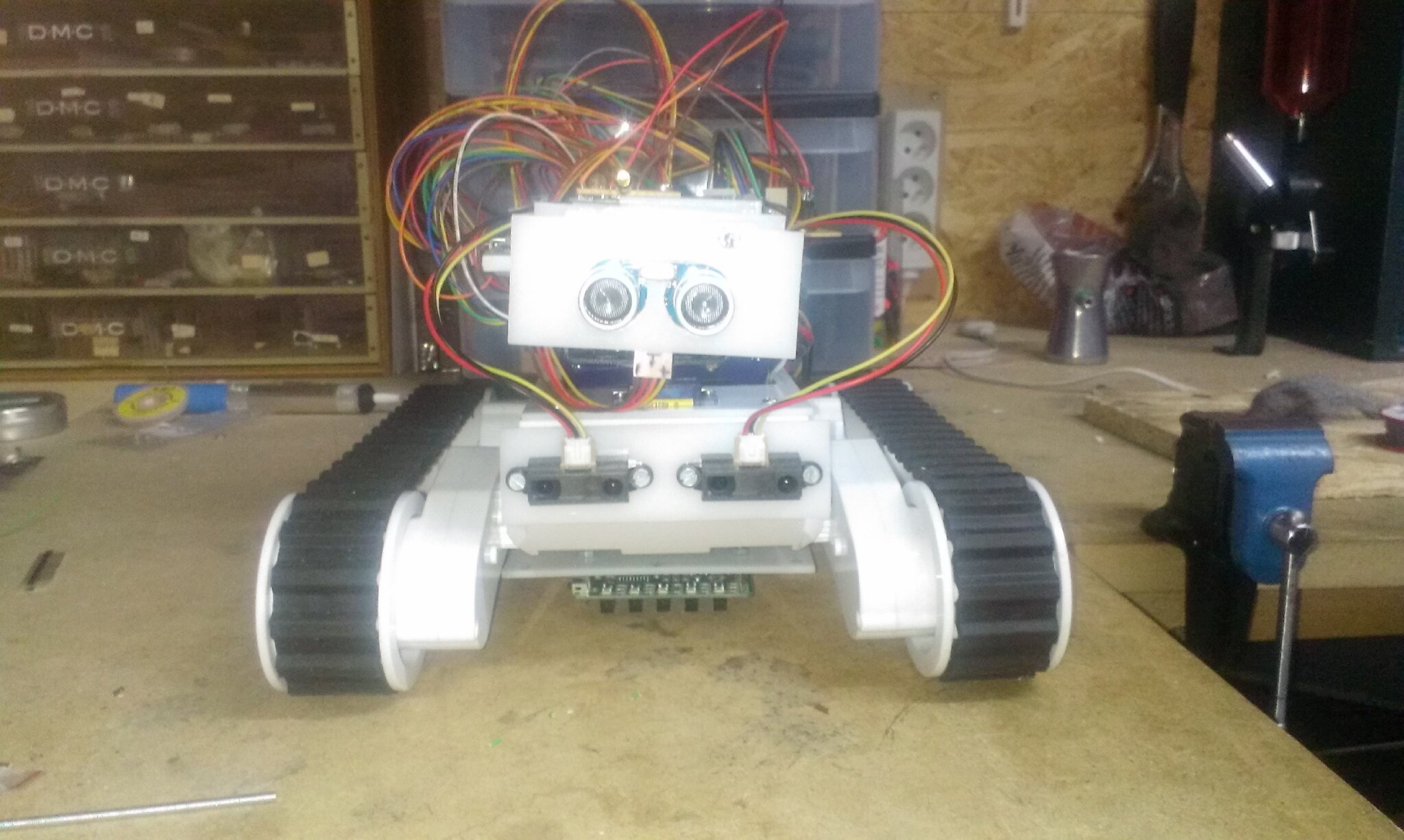

En avant du robot, on a un télémètre sur une tourelle qui permet d'établir un plan de ce qui est placé devant (débattement d'un peu moins de 90° à gauche comme à droite). Deux capteurs d'inclinaison sont placés également à coté du télémètre pour s'assurer que la mesure est bien effectuée dans le plan horizontal).
Une batterie LiPo (comme celles utilisées en modélisme) alimente le robot et est visible juste derrière la tourelle.
Au dessus de la chenille droite (en haut sur la vue de dessus) est également présent une horloge (base temps), un récepteur GPS (positionnement si le robot est en extérieur), et un lecteur de carte SD pour enregistrer différentes informations (et décharger la mémoire de l'arduino de cette tache).
Des encodeurs sont placés au niveau des moteurs du robot pour permettre de mesurer le déplacement effectué par le robot.
Une barre de 5 capteurs IR est placés sous le robot pour lui permettre de suivre un parcours placé au sol (ligne définissant le trajet à suivre).
Le circuit électronique visible sur le dessus du robot permet la connexion et l'alimentation des différents capteurs.



/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
/https%3A%2F%2Fstorage.canalblog.com%2F52%2F74%2F1267693%2F97183004_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F51%2F80%2F1267693%2F96872872_o.jpg)