Concernant la plateforme, les premiers essais utilisaient une simple plaque avec deux moteurs (et donc deux roues) et une "foue folle" à l'arrière. Ce modèle d'architecture a vite montré ses limites face à des obstacles assez mineurs; un simple cable, une sifférence de niveau meme faible bloquait un coté du robot.
Rapidement je me suis orienté sur un chassis de type DAGU Rover 5 (dont voici un schéma)
 Ce type de chassis permet de franchir des obstacles simples (un cable électrique, un tapis, ...). Chaque coté a son moteur et un système de mesure de la distance parcourue.
Ce type de chassis permet de franchir des obstacles simples (un cable électrique, un tapis, ...). Chaque coté a son moteur et un système de mesure de la distance parcourue.
Concernant le guidage du robot, la solution basique d'un robot suiveur de ligne a été envisagée dans un premier temps. Basique, elle a permis d'obtenir assez rapidement un engin capable de suivre un parcours prédéfini.
Mais cette solution a des limites qui ne sont compatibles avec ce qui est recherché :
- La marque matérialisant le parcours peut aisément etre masqué ou brouillé (un simple cable recouvrant en partie le tracé peut suffire à ce que le robot prenne une mauvaise direction).
- Dans le cas d'une utilisation en extérieur, la marque peut etre difficile à trouver (herbe, conditions de lumière).
Pour ces raisons, d'autres systèmes de guidage / positionnement sont à l'étude :
- Capteur GPS. Utilisable en extérieur uniquement, mais permet à RAVEN de trouver sa position et la direction à prendre meme en l'absence de repères.
- Télémètre à ultra-sons. Monté sur une tourelle, RAVEN peut "cartographier" son environnement direct. On peut meme imaginer que dans un espace inconnu, RAVEN commencera par une phase d'apprentissage où il parcourera l'espace possible. Par la suite, il pourra ainsi retrouver son emplacement et le chemin à suivre en mesurant l'espace autour de lui.
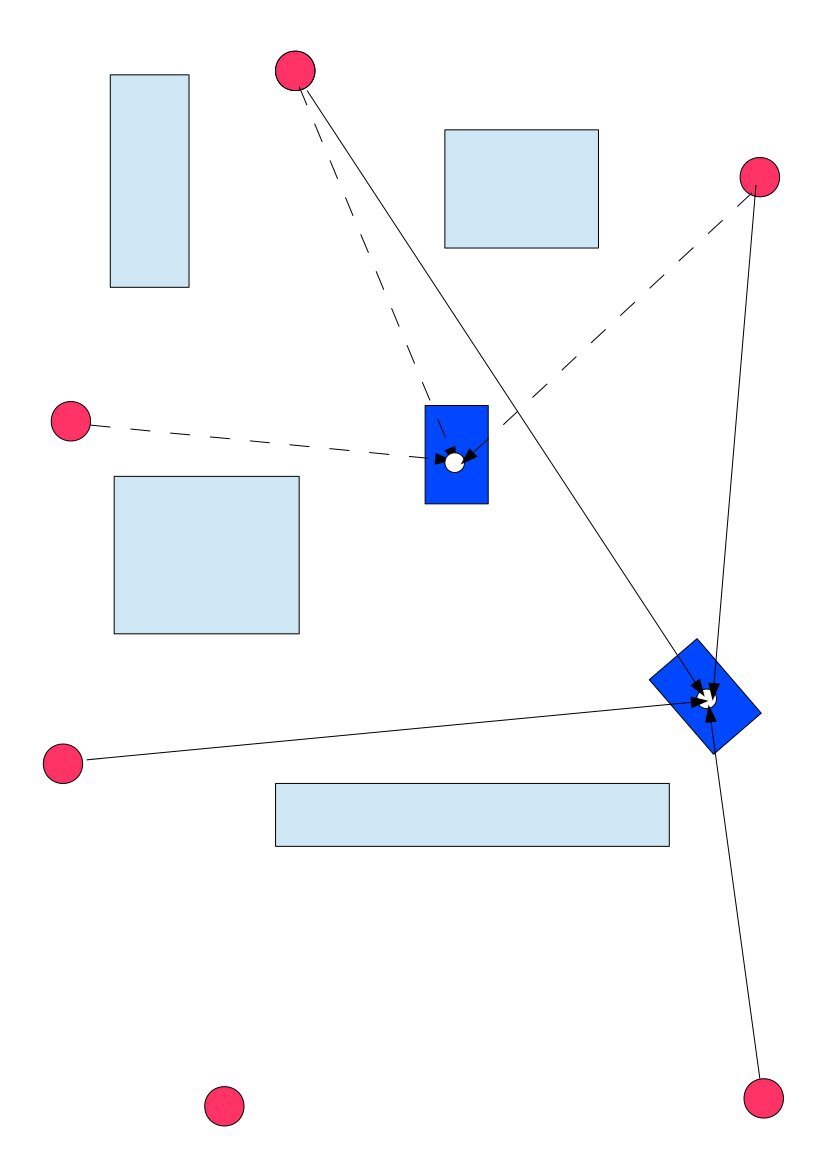
- Positionnement par triangulation. Une source lumineuse (laser ou lampe avec un faisceau suffisament concentré) est montée sur une tourelle du robot; dans l'environnement de RAVEN, différentes 'balises' sont placées à des endroits déterminés; quand une balise est éclairée, elle envoye un message à RAVEN (liaison radio ou Wifi). Pour trouver sa position, RAVEN balaye l'espace autour de lui. Quand une balise lui répond, en combinant la position de la balise qui a répondu avec l'angle qu'il forme avec le faisceau lumineux il peut définir une ligne sur laquelle il est positionné. La réponse de plusieurs balises détemine une position ou du moins un secteur (en fonction de l'imprécision des mesures) où il est positionné.
- Le système de suivi de ligne précédemment évoqué peut etre une solution acceptable dans certains cas.
- Programmation directe. Par le système d'odométrie intégré, il est possible de définir un parcours précis du robot (avancer de 3 mètres, tourner à droite de 90°, avancer de 65 cm, ...).
- Guidage par un système extérieur. Un système de caméras fixes identifie la position du robot par un programme sur un PC fixe. Ce dernier envoie alors des ordres à RAVEN par radio ou Wifi pour effectuer le trajet.
- Plateforme inertielle. L'intégration des accélérations reçues dans les trois axes permet de calculer la vitesse du module. L'intégration des vitesses permet de définir les déplacements par raport à une position de base. Malheureusement les systèmes utilisables sur RAVEN sont relativement imprécis et ne permettent pas un guidage prolongé avec une précision acceptable. Ce système est néanmoins utilisable sur de courts moments (détection de la fin d'un virage à angle droit par exemple) mais rev^et peu d'intéret avec le système odométrique incoporé.
Par sécurité deux capteurs de télémétrie (fixes) ont été placés à l'avant de RAVEN. Ils permettent de détecter un obstacle imprévu et de stopper la progression.
Concernant la partie électronique, la plateforme Arduino est retenue dans un premier temps. Elle permet de raccorder aisément différents capteurs (GPS, télémètre, gyroscope) et de piloter l'éventuelle tourelle télémétrique avec une assez bonne précision. Cependant pour des questions de temps de réponse, il est possible de devoir déporter certaines fonctions basques à d'autres systèmes (micro-controleurs PIC par exemple). Je pense en particulier à la stabilisation de la tourelle. Il est important pour que la mesure soit pertinente que la rotation s'effectue dans le plan horizontal. Un système PIC peut etre alors affecté à l'inclinaison de la tourelle pour effectuer les corrections nécessaires sans que le système Arduino principal en soit affecté.